MA Hongwei, YAO Yang, XUE Xusheng, WANG Chuanwei, GAO Jiachen. Research on body positioning method of drill-anchor robot based on multi-sensor combination[J]. COAL SCIENCE AND TECHNOLOGY, 2021, 49(1): 278-285. DOI: 10.13199/j.cnki.cst.2021.01.025
Citation:
MA Hongwei, YAO Yang, XUE Xusheng, WANG Chuanwei, GAO Jiachen. Research on body positioning method of drill-anchor robot based on multi-sensor combination[J]. COAL SCIENCE AND TECHNOLOGY, 2021, 49(1): 278-285. DOI: 10.13199/j.cnki.cst.2021.01.025
MA Hongwei, YAO Yang, XUE Xusheng, WANG Chuanwei, GAO Jiachen. Research on body positioning method of drill-anchor robot based on multi-sensor combination[J]. COAL SCIENCE AND TECHNOLOGY, 2021, 49(1): 278-285. DOI: 10.13199/j.cnki.cst.2021.01.025
Citation:
MA Hongwei, YAO Yang, XUE Xusheng, WANG Chuanwei, GAO Jiachen. Research on body positioning method of drill-anchor robot based on multi-sensor combination[J]. COAL SCIENCE AND TECHNOLOGY, 2021, 49(1): 278-285. DOI: 10.13199/j.cnki.cst.2021.01.025
College of Mechanical Engineering, Xi’an University of Science and Technology,Shaanxi Key Laboratory of Mine Electromechanical Equipment Intelligent Monitoring
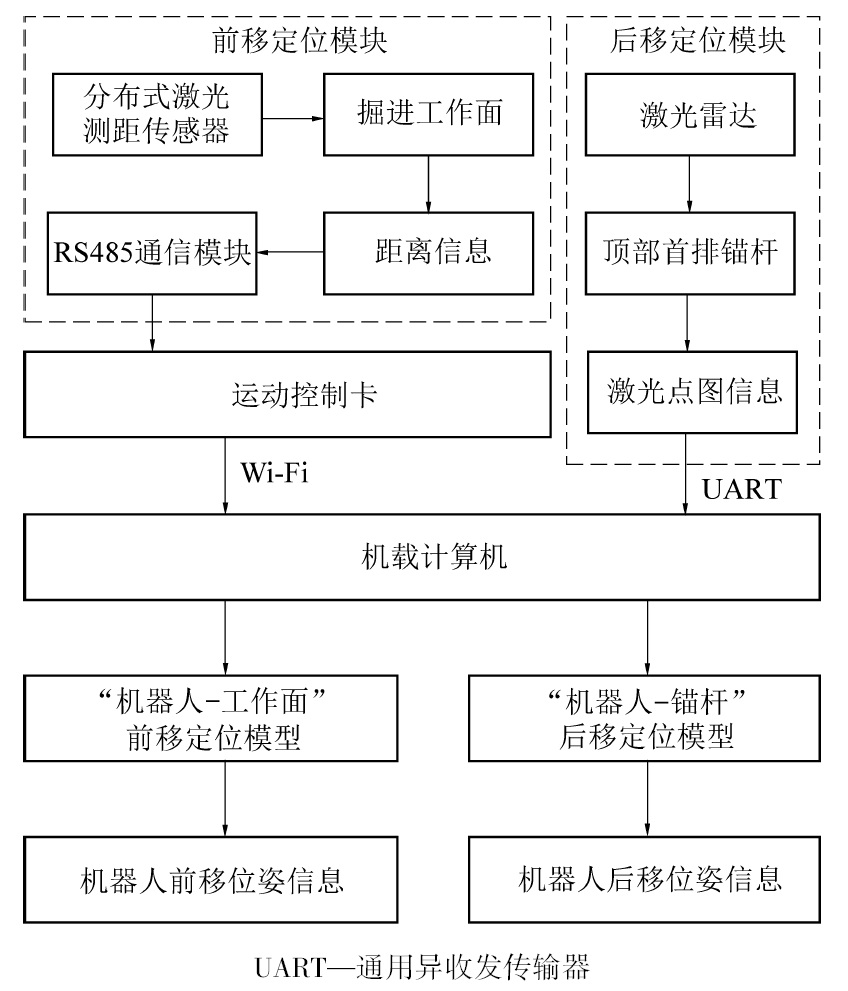
At present, the drilling and anchoring operations in coal mines are still dominated by manual operations with high operation intensity, harsh environment and low efficiency. In order to improve the efficiency and ensure the safety of workers, the coal mine drilling and anchoring robots have been developed to improve the automation level of drilling and anchoring operations. In order to solve the problems of difficult positioning, large interference, low accuracy and low efficiency of the anchor drilling robot body under working conditions, a positioning method based on the combination of laser ranging sensor and lidar was proposed. According to the requirements of the drilling and anchoring operation, the distance information between the drill-anchor robot and the developemnt face based on the distributed laser ranging sensor was studied, and the “robot-working face” positioning model was established, and the position relationship between the drill-anchor robot and the driving face in the process of moving forward was solved; Taking the top bolt at the back end of the robot as the target, the dynamic point map information of the bolt and the drill-anchor robot was obtained by using the laser radar scanning, and the “robot-bolt” positioning model was established, and the spatial position relationship between the robot and the anchor rod during the backward moving process was calculated. The combined positioning system was built and verified by the prototype experiment. The results show that the distance error of the “robot-working face” positioning model is less than 10 mm, the yaw angle error is not more than 1°, the distance error of the “robot-bolt” positioning model is not more than 20 mm, and the yaw angle error is not more than 1.5°, which can realize automatic, accurate and real-time positioning target of drill-anchor robot body






 DownLoad:
DownLoad: