

Lidar based map construction fusion method for underground coal mine shaft bottom
-
摘要:
煤矿智能化是煤炭行业高质量发展的技术支撑,关键岗位的机器人替代是实现煤炭少人化、无人化的高效开采的发展趋势。即时定位与地图构建(Simultaneous Localization and Mapping,SLAM)是煤矿机器人自主移动与导航的关键技术之一。煤矿井下为典型非结构化环境,空间狭长局促,结构复杂多变,照明情况不均匀,对煤矿井下SLAM提出了严峻挑战。总结了煤矿井下地图构建研究现状,针对LeGO-LOAM算法的回环检测仍存在的不足,利用SegMatch算法改进LeGO-LOAM的回环检测模块,且使用ICP算法进行全局图优化,提出了一种融合LeGO-LOAM和SegMatch的改进算法,阐述了该算法的原理和实现步骤;开展了煤矿井下模拟场景试验,对比分析改进前后SLAM算法的建图效果以及精度,试验结果表明改进算法构建的地图回环效果更好,估计轨迹更平滑、精确;结合导航需求研究了二维占据栅格地图的构建方法,试验验证了该方法所构建的栅格地图精度,结果表明有效滤除动态障碍物等离群噪点后的栅格地图具有0.01 m的建图精度,且所需存储空间较点云地图降低了3个数量级。研究成果有助于煤矿井下非结构环境下SLAM和煤矿机器人实时定位和自主移动。
Abstract:Intellectualization of coal mine is the technical support for high-quality development of coal industry, and robot replacement of key posts is the development trend of realizing efficient mining of coal with few people and no people. Simultaneous localization and mapping (SLAM) is one of the key technologies for autonomous movement and navigation of coal mine robots. The environment of underground coal mine is a typical unstructured environment, with narrow space, complex and changeable structure and uneven lighting, posing a severe challenge to the realization of SLAM in the underground coal mine. The research status of the map construction of the underground coal mine is summarized. In view of the shortcomings of the loopback detection of the LeGO-LOAM algorithm, the SegMatch algorithm is used to improve the loopback detection module of the LeGO-LOAM, the ICP algorithm is used to optimize the global map, and an improved algorithm integrating LeGO-LOAM and SegMatch is proposed, and the principle and implementation of the algorithm are discussed. The underground simulation scene experiments of coal mine were carried out, the mapping effect and accuracy of SLAM algorithm before and after the improvement were compared and analyzed, and the results showed that the map loopback effect constructed by the improved algorithm was better, and the estimated trajectory was smoother and more accurate. The construction method of two-dimensional occupied grid map is studied aiming at the navigation requirements, and the accuracy of the grid map constructed by this method is verified through experiments. The results show that the grid map after effectively filtering outliers such as dynamic obstacles has a mapping accuracy of 0.01 m, and the required storage space is 3 orders of magnitude lower than that of the point cloud map. The research results are helpful to the realization of SLAM and real-time positioning and autonomous navigation of the coal mine robot under the unstructured environment of the underground coal mine.
-
0. 引 言
煤炭作为我国主体能源,其智能化建设是国家能源发展战略和行业共识[1]。为引导煤炭企业、科研机构等参与研发应用,推进煤矿少人化、无人化开采,国家安监局《煤矿机器人重点研发目录》重点阐述了掘进、采煤、运输、安控和救援5类38种煤矿机器人。现阶段煤矿机器人的研发大致分为4类,即巡检类、直接作业类、辅助作业类和救援类机器人[2]。巡检类机器人业已实现在煤矿现场的应用[3],而作业机器人关键技术仍存在壁垒,许多学者正攻关研究[4-6]。针对井下受限封闭环境下机器人自主精准定位导航技术这一煤矿机器人共性关键技术,也成为研究热点[7-9]。即时定位与建图(Simultaneous Loacation and Mapping, SLAM)是煤矿机器人构建复杂煤矿井下环境地图及其自身智能定位的实现途径之一,也是当前的研究热点问题之一。
Peter Cheeseman[10]和Durrant-Whyte[11]等在1986年美国旧金山举行的IEEE Robotics and Automation Conference会议提出使用概率的方法解决机器人定位的问题,SLAM相关研究引起了学者的关注。根据所用的传感器不同,SLAM算法大致有基于视觉的和基于激光雷达的2种[12-13]。
针对煤矿井下环境SLAM技术的发展,已经进行了许多工作。CHEN等[14]利用机载激光雷达SLAM技术构建煤矿巷道环境地图,采用激光扫描匹配和改进的概率激励最大似然估计算法生成三维隧道模型,提高了建图精度,但存在成本较高、信息较少的问题。 LI等[15]提出了一种基于正态分布变换(Normal Distributions Transform,NDT)的实时3D SLAM,并通过位姿图优化和闭环检测进一步提高建图一致性。杨林等[16]研究了煤矿巡检机器人的SLAM方法,结合自适应蒙特卡罗定位算法和优化Fast-SLAM算法提高了机器人定位的自适应性和地图构建的精确性,提出了一种基于激光惯性的融合SLAM算法[17],由前端迭代卡尔曼滤波和后端位姿图优化组成,提高了算法的精度、实时性和鲁棒性,保证了全局一致性。YANG等[18]在Hector-SLAM算法的基础上,提出了一种基于自耦合和Hector-SLAM的矿山巷道环境建模与井底掘进机定位方法。对巷道环境的适应性进一步增强,提高了算法在巷道环境中的准确性。A. COWLEY等[19]提出了基于全景深度图像的建图方法UPSLAM(Union of Panoramas SLAM),利用手持式激光雷达和惯性测量单元(Inertial Measurement Unit,IMU)采集全景深图像数据,开展了煤矿井下地图构建试验。XU等[20]针对煤矿巡逻无人机的导航问题,搭建了基于IMU、亮度检测和测距(LIDAR)系统、深度相机的无人机导航系统,研究了基于概率膜计算的SLAM算法PMC-SLAM(Probabilistic Membrane Computing-Based SLAM)。REN等[21-22]根据巷道特点,将巷道平面作为节点约束,研究了基于规则和GICP(Generalized Iterative Closest Point)的轻量级回环检测与SLAM优化算法;首次提出距离权重图并应用到煤矿井下定位。
井底车是连接矿井主要提升井筒和井下主要运输、通风巷道的若干巷道和硐室的总称,是连接井筒提升和大巷运输的枢纽,担负着对煤炭、矸石、伴生矿产、设备、器材和人员的转运,并为矿井通风、排水、动力供应、通信、安全设施等服务,环境错综复杂且封闭狭长给SLAM的应用带来了困难,由于灰尘和恶劣的照明条件,导致特征点提取不稳定,实际应用中视觉SLAM容易建图失败。由于激光雷达不依赖于外界光照条件或目标本身的辐射,基于激光雷达的SLAM算法较适合煤矿井下环境。然而煤矿巷道作业区域低纹理、特征信息不足导致的退化问题是激光雷达扫描建图的严峻考验。同时,3D激光雷达获取无序点云,而随着维度的增加,点云的数据量与计算量大幅增加,使得实时的运动估计和精确的点云地图构建目前仍无法同时满足。煤矿井下井底车场空间狭长局促,环境复杂多变,围岩结构复杂且不规整,照明条件差,且车辆调度复杂,对SLAM提出了更高的要求和挑战。煤矿井下环境的地图构建需要兼顾实时性和精度,还有很多问题需要解决,回环检测就是问题之一。
LOAM(Lidar Odometry and Mapping)[23-24]是目前最具代表性的基于特征匹配的实时3D激光SLAM算法,计算量小且具有运动补偿,但无回环检测,大规模测试中会出现漂移。对于回环检测,局部描述符如SHOT[25]、ISHOT[26]和FPFH[27],其重新识别通常需要关键点提取和大规模的局部几何计算,检测效率偏低;全局描述符更擅长检测具有高重复性的关键点,如GLAROT-3D[28]、Scan Context[29]、LiDAR Iris[30];但是目前激光的局部或者全局描述符的描述能力和旋转不变性能仍然有所欠缺。2017年,R. Dubé等[31]提出了SegMatch算法,根据DOUILLARD和NIETO等[32-33]的研究基础对三维点云进行分割匹配并实现位置识别。SegMatch不依赖于“完美分割”的假设,也不依赖于环境中“对象”的存在,在大规模非结构化环境中也能够可靠地运行,可用作高效、鲁棒的回环检测。基于深度学习的回环检测方法,如目前的算法[34-36]则由于算力要求高以及需要大量训练数据,严重依赖于样本集的性能,应用于煤矿井下自主导航仍缺乏工程实用性。
已有学者研究了LOAM经典框架和回环检测算法的融合,针对LOAM算法的不足,SHAN T等[37]增加了以ICP和欧式距离结合来寻找回环点的回环检测方法,并在特征提取上进行了轻量化和地面优化处理,提出了LeGO-LOAM(Lightweight and Ground-Optimized Lidar Odometry and Mapping)算法,在计算资源减少的情况下实现了相似或更好的精度,但有时回环检测会出现错误或识别遗漏。2019年,JI等[38]将LOAM的雷达里程计与SegMatch的点云匹配相融合,提出具备回环测试功能的激光雷达SLAM算法LLOAM,减少了漂移误差,提高了建图精度。2020年,欧阳仕晗[39]通过SegMatch类算法订阅并调用LOAM类算法的激光建图节点发布的低漂移、实时坐标转换关系,有效提高了大尺度室外场景下SegMatch类算法的相对位姿估计精度。
虽然目前已有针对LOAM类算法和SegMatch类算法的融合研究相应提高了算法精度,但相关研究仍有不足,文献[38]利用SegMatch实现LOAM的回环检测,文献[39]在进行SLAM建图时,只是利用了LOAM类算法的里程计信息。本团队之前的工作[40]利用LeGO-LOAM算法结合Scan Context提出了一种改进LEGO-LOAM算法,可用于煤矿井下机器人的即时定位和建图。Scan Context算法是基于几何信息特征编码创建全局描述子,利用局部特征快速搜索,仅利用最大高度信息,丢失了部分点云信息,且不具有旋转不变性。SegMatch回环检测方法既考虑了局部特征,又基于机器学习进行聚类,增强了鲁棒性。笔者针对煤矿井底车场复杂环境,利用SegMatch替换LeGO-LOAM的回环检测模块,并利用ICP(Iterative Closest Point)算法进行全局图优化,提出了融合SegMatch和LeGO-LOAM的煤矿井下SLAM算法,以获得了更好的回环效果和更加鲁棒精确的地图;搭建了履带式机器人系统,开展了煤矿井下模拟环境的地图构建试验验证,研究了三维(3D)占据栅格地图和二维(2D)占据栅格地图生成并讨论了建图精度,为煤矿井下环境的地图构建和煤矿机器人即时定位和自主导航提供技术支撑。
1. 算法原理及改进
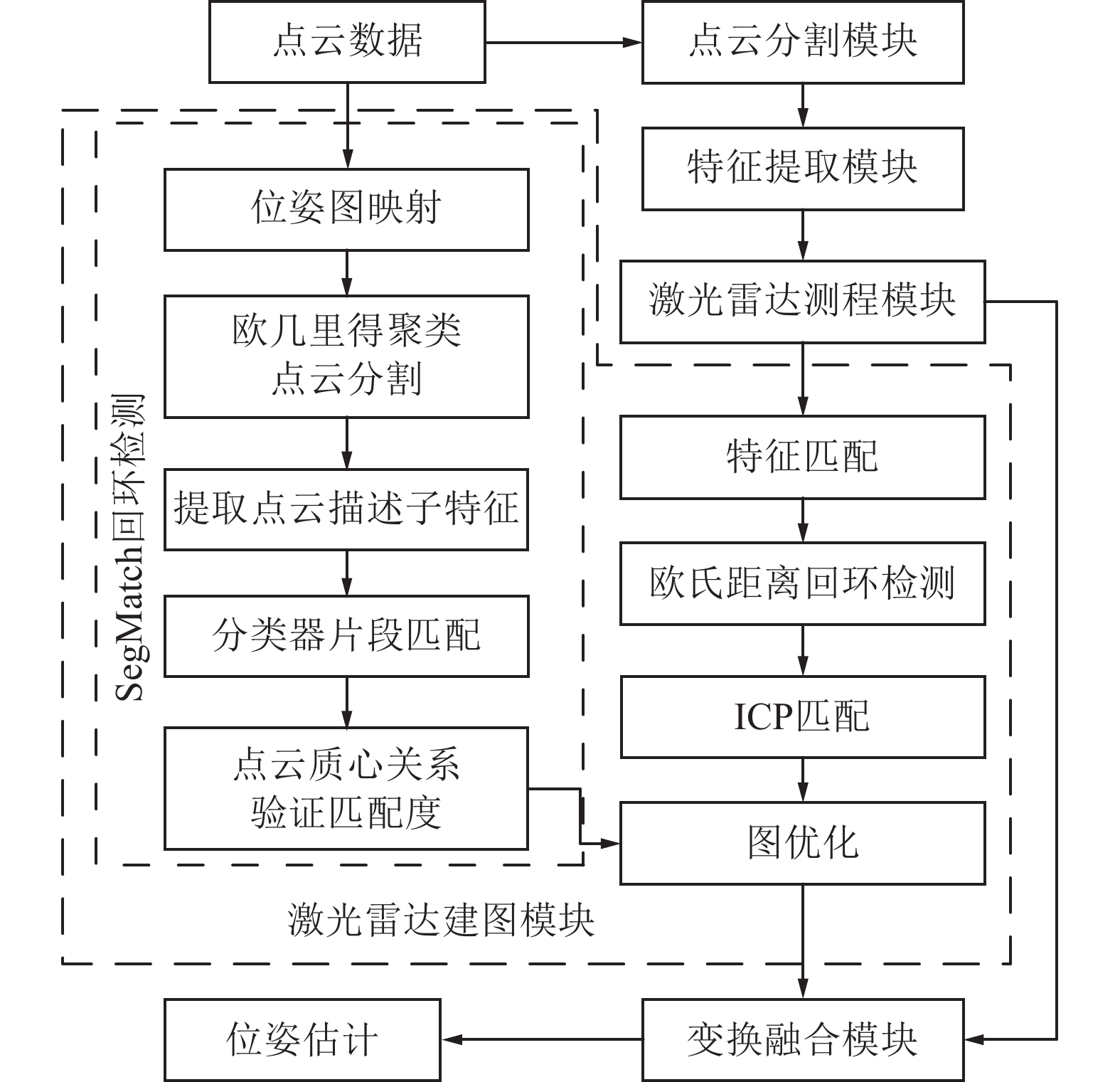
传统的LeGO-LOAM算法回环检测是通过基于欧氏距离的ICP回环检测算法实现的,有时会出现错误或识别遗漏现象。为此,本文融合检测精度高的SegMatch回环检测,对传统的LeGO-LOAM算法的回环检测进行改进,提出了优化全局位姿估计的LeGO-LOAM-SM算法,改进后的算法框图,如图1所示。
LeGO-LOAM-SM算法的点云分割、特征提取、激光雷达测程模块和LeGO-LOAM算法的部分相同[37]。点云分割模块能够提高处理效率和特征提取的准确性,将点云Pt分割成不同的簇,并标记为地面点或分割点,同时获得每个点的3个特征,即该点的标签、在深度图中的行列索引和距离值,供后续模块使用。特征提取模块从地面点或分割点提取边缘和平面特征。根据粗糙度计算,设置阈值划分边缘特征点和平面特征点。将深度图均匀划分,并得到子图像的特征点集合和特征集合。激光雷达测程模块估计两连续扫描帧的机器人运动,使用从特征提取模块中提取的特征找到在连续扫描帧机器人位置的相关转换。采用标签匹配缩小匹配范围和准确性,并采用两步L-M(Levenberg-Marquardt)优化方法寻找两连续扫描帧间的转换关系。
在此重点阐述激光雷达建图模块的原理。激光雷达建图模块首先将提取的特征与局部点云图进行匹配并逐步细化姿态变换,使用L-M优化获得最终的变换位姿,并添加点云地图中新节点与历史节点间的空间约束,接着以较低频率进行基于欧氏距离的回环检测,最后使用ICP匹配当前帧和回环帧的点云并加入新约束,再将位姿图像发送至基于因子图的优化库GTSAM(Georgia Tech Smoothing and Mapping)进行图优化并更新姿态估计。其中,低频率的回环检测是基于欧氏距离的,利用KD Tree模型搜索当前位姿的历史或相似位姿及其附近的几帧点云,寻找以机器人当前位姿为原点、半径为7 m的区域内的若干位姿,并利用历史位姿和当前位姿时间差大于30 s的约束来判断是否满足回环,因计算量大,采用较低运行频率兼顾实时性和精确性。
SegMatch则以较高频率进行回环检测:
1)点云分割。SegMatch接收来自激光雷达的三维点云,把点云分割为有区别的元素来匹配。对点云进行去除地平面处理,通过垂直方差以及平均值实现相邻体素聚类;利用欧几里德聚类将剩余区域分割为片段,选取并去除没有建图作用且影响建图效果的噪声,把输入点云网格化处理,使用“全聚类方法”把过滤后的点云分割成多组聚类点。
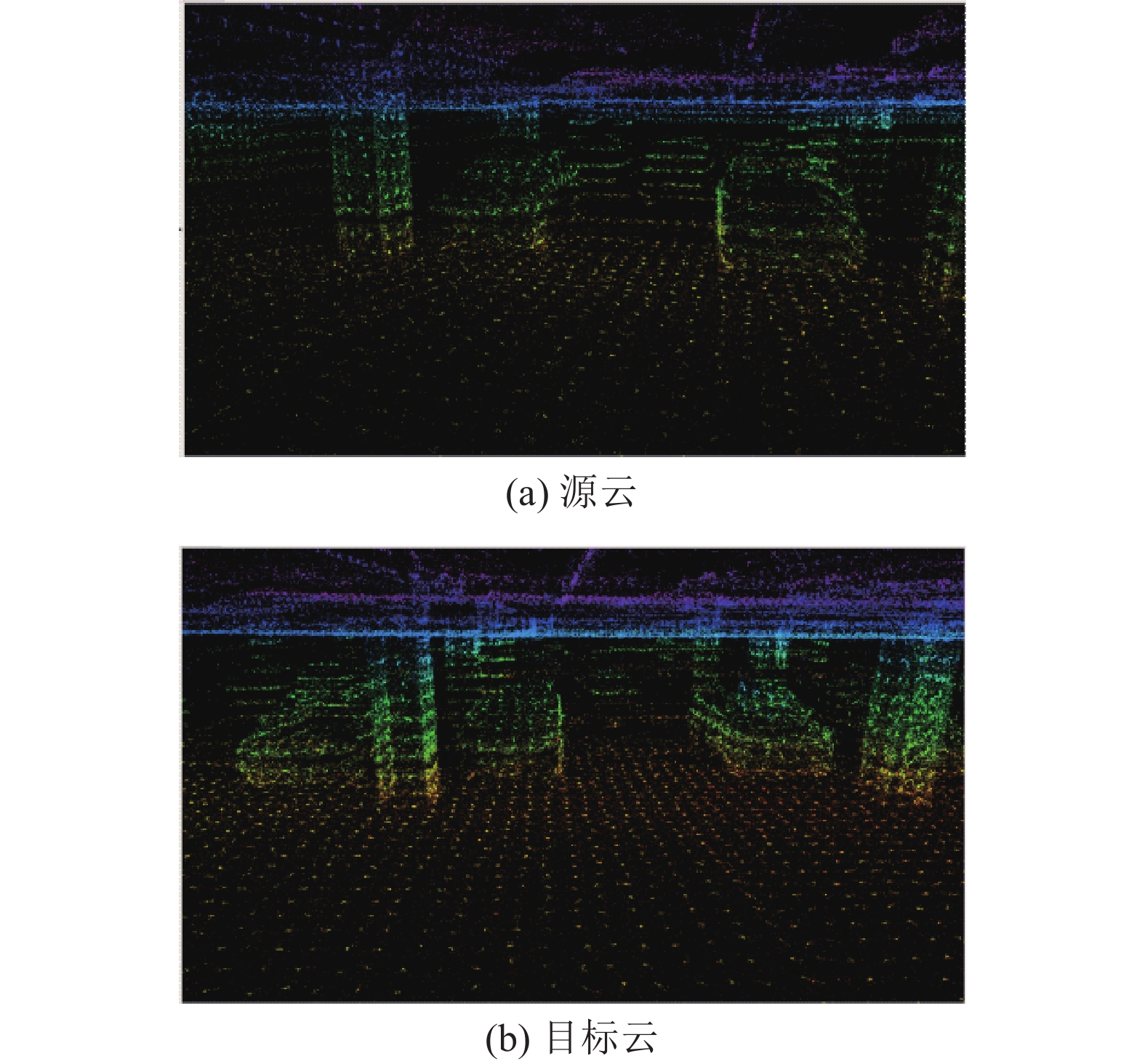
2)特征提取。点云分割后,从各个片断提取特征得到点云描述子,并用分类器判断两个片段能否描述为同一对象或相同对象部分。提取描述子特征如图2所示,对某一时刻的点云即源云及再次回到当前位置传感器扫描到的点云即目标云进行片段分割,选取可以用作点云识别和分类的特征,计算其特征向量用以判断。
![]() 图 2 SegMatch点云分割、特征提取Figure 2. Point cloud segmentation and feature extraction with SegMatch
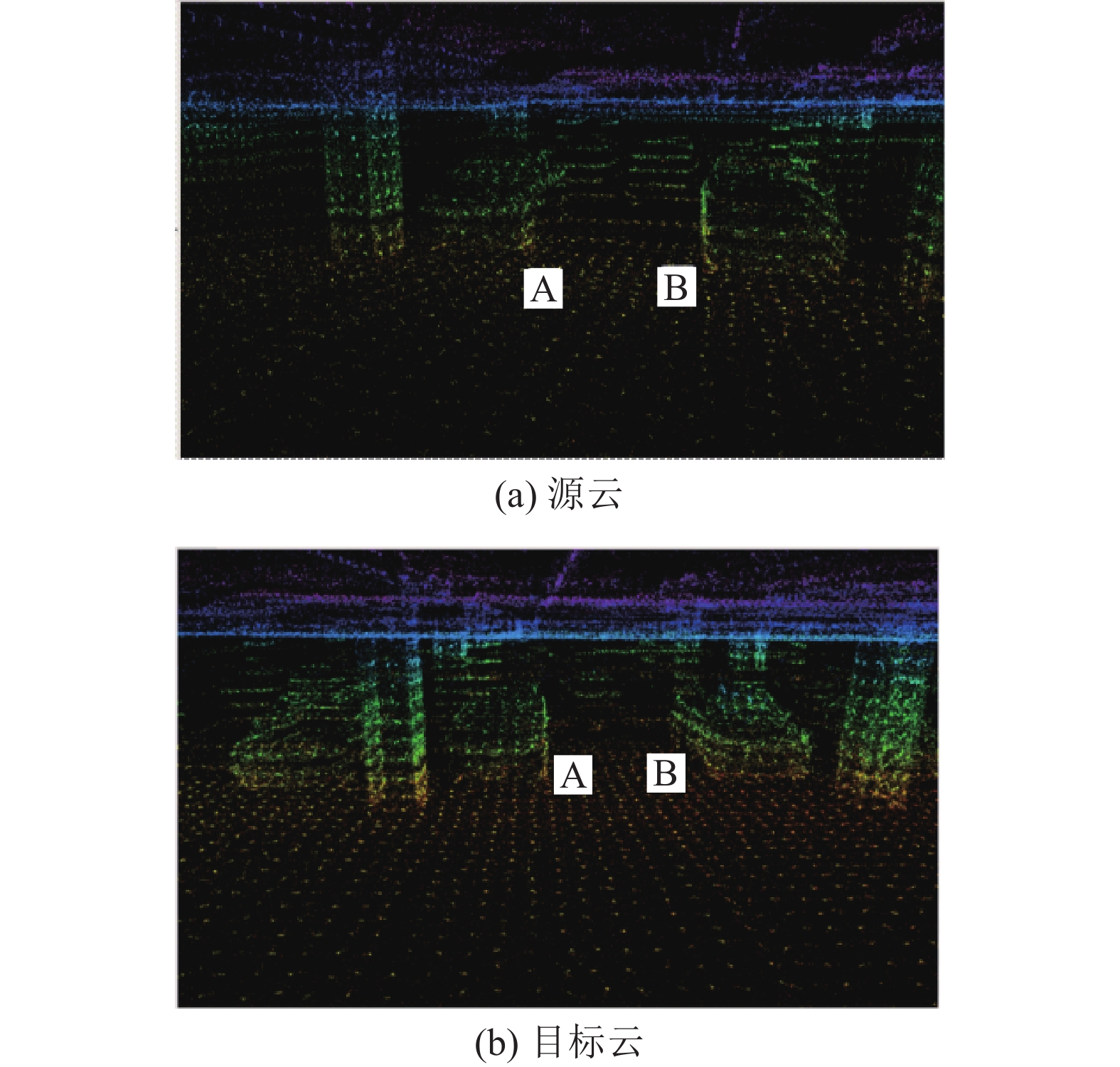
图 2 SegMatch点云分割、特征提取Figure 2. Point cloud segmentation and feature extraction with SegMatch3)分段匹配。利用描述子特征以识别源云和目标云之间的匹配关系。由于涉及多个特征类型时,使用传统的方法通常很难选择合适的距离度量和阈值,故选择基于学习的方法。先通过KD树搜索来检索候选匹配,然后再将其送入随机森林分类器确定两个部分的匹配的点云是否代表相同的对象或对象中某一部分。
4)几何验证。将分段匹配得到的候选送入几何验证模型。几何验证利用随机抽样一致性算法,通过分割点云的质心计算两点云间的旋转矩阵,并根据对应关系的几何一致性检查匹配程度。划分的点云集群中,几何信息一致的可以被看作是同一物体。图3中,使用两物体的质心计算两者的转换关系,则认为目标云中物体C和物体D对应源云中物体A和物体B为同一物体。
5)回环检测。在线建立目标点云以进行回环检测,提取圆柱邻域局部点云,执行一次分割和特征提取,生成的源分割点云用于匹配和构建目标地图。在目标地图中添加源分割点云时,移除不完整的分割点云并删除重复的分割点云。检测到回环后,重新估计机器人的轨迹,并更新目标点云的位置。
完成SegMatch对齐分割点云并滤波去掉重复片段的步骤后,用ICP匹配当前帧和回环帧的点云以加入新约束,把位姿图发送至GTSAM进行位图优化并更新姿态估计。变换融合模块通过来自于激光雷达建图模块的位姿估计修正激光雷达测程计模块的位姿估计,通过点云的特征匹配来求得变换矩阵进行位姿更新,从而输出最终的位姿估计。
2. 试验验证
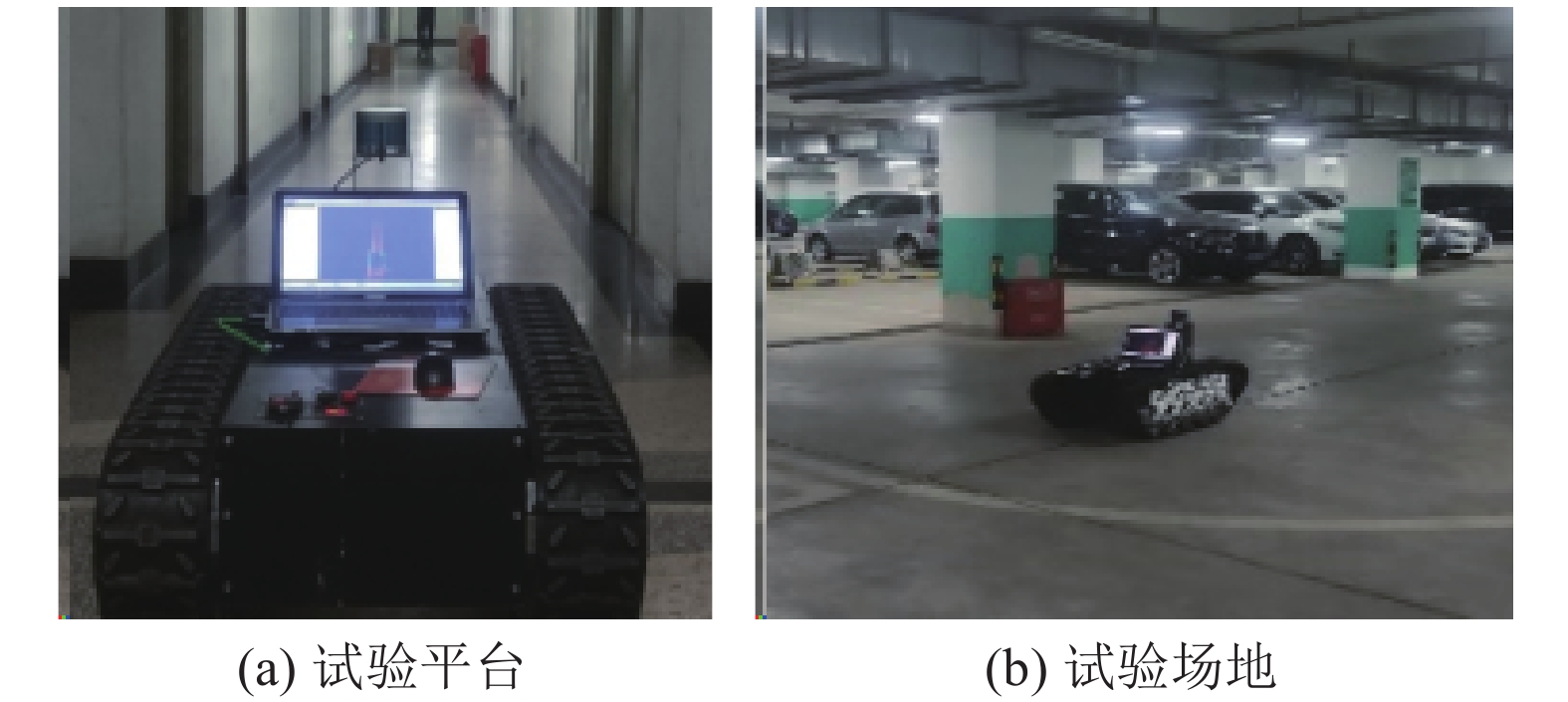
试验平台由笔记本电脑、履带式机器人底盘和激光雷达组成,如图4a所示。其中,履带式机器人底盘尺寸1 185 mm×765 mm×395 mm,额定功率1 kW×2,最大越障150 mm,最大跨越≥300 mm,底盘高度200 mm,带宽150 mm,最大爬坡≥30°,最大载重100 kg。试验平台搭载的三维激光雷达RS-LiDAR-16,其测量范围150 m,精度±2 cm,垂直视角30°,水平视角360°,垂直角度分辨率2°,水平角度分辨率0.2°,旋转速率设置为10 Hz。笔记本电脑硬件配置内存Intel Core i3-4100 M和NVIDIA GeForce 940 M,软件系统为Ubuntu 18.04+ROS melodic。
选取地下停车场场景进行验证,如图4b所示。停车场主要结构为柱、梁、汽车等,场景较复杂,且存在减速带、下水道等颠簸路面,照明情况不均匀,存在粉尘干扰,通过地下停车场场景模拟井下车场以测试算法的定位建图精度和鲁棒性。
2.1 建图效果
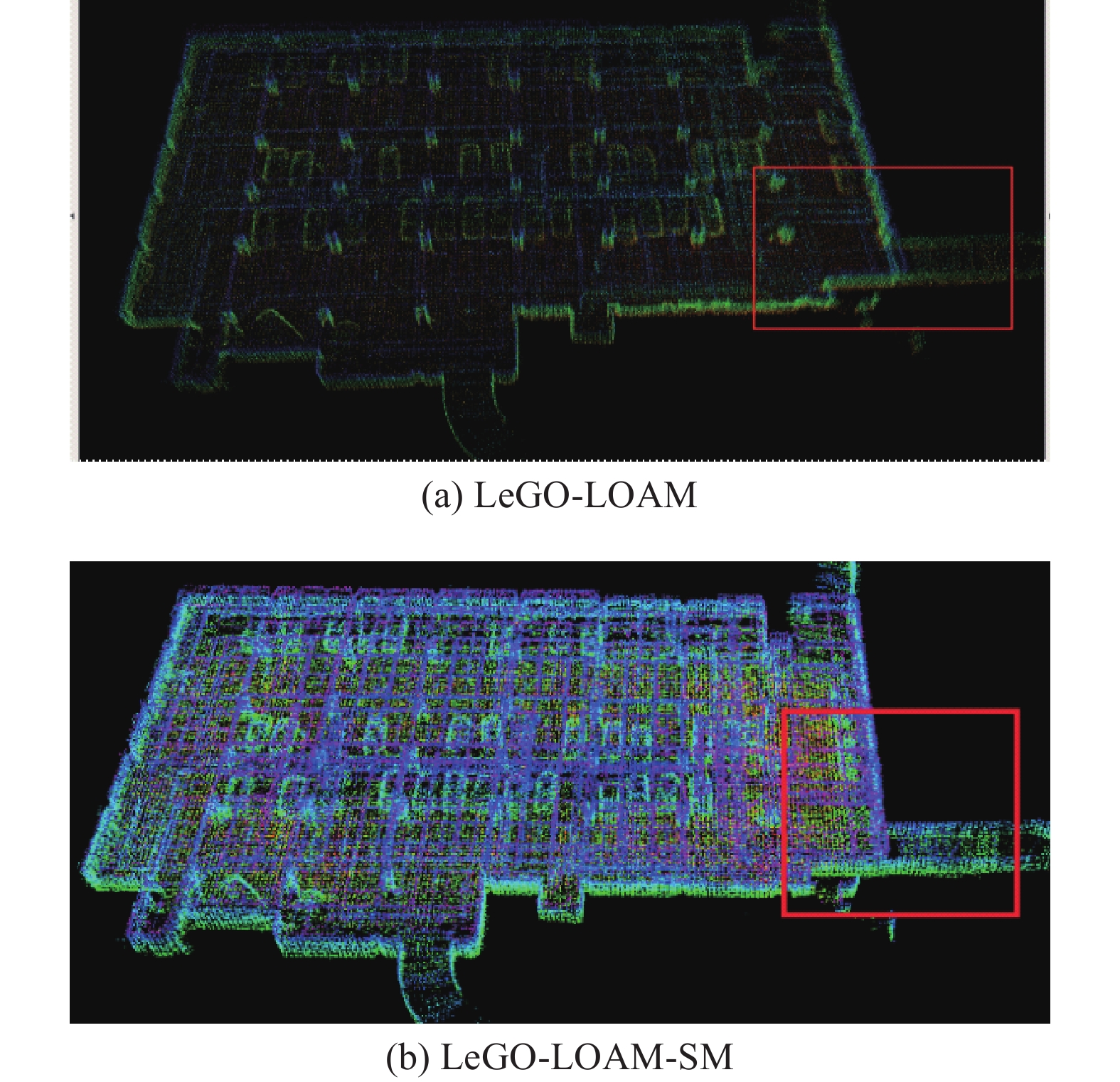
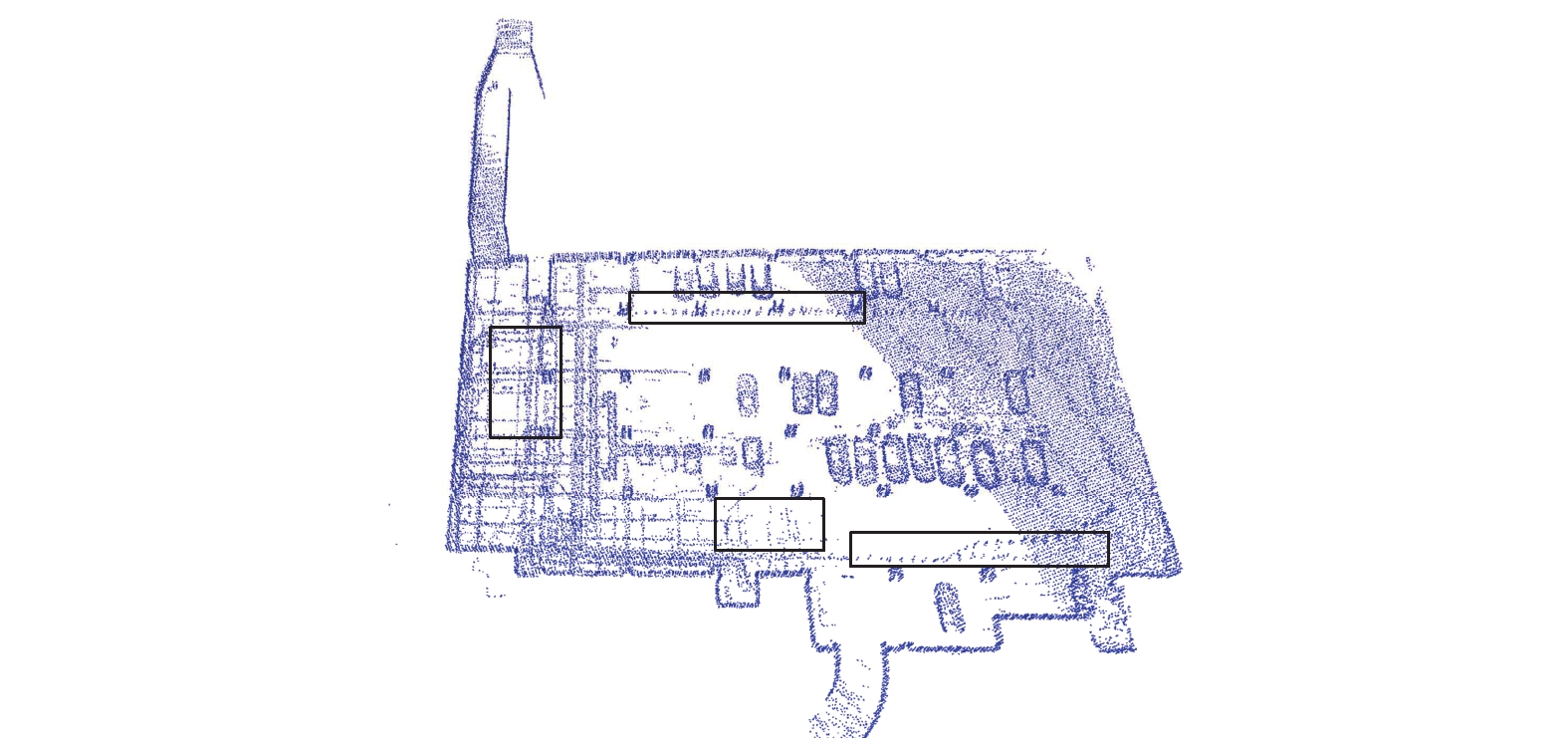
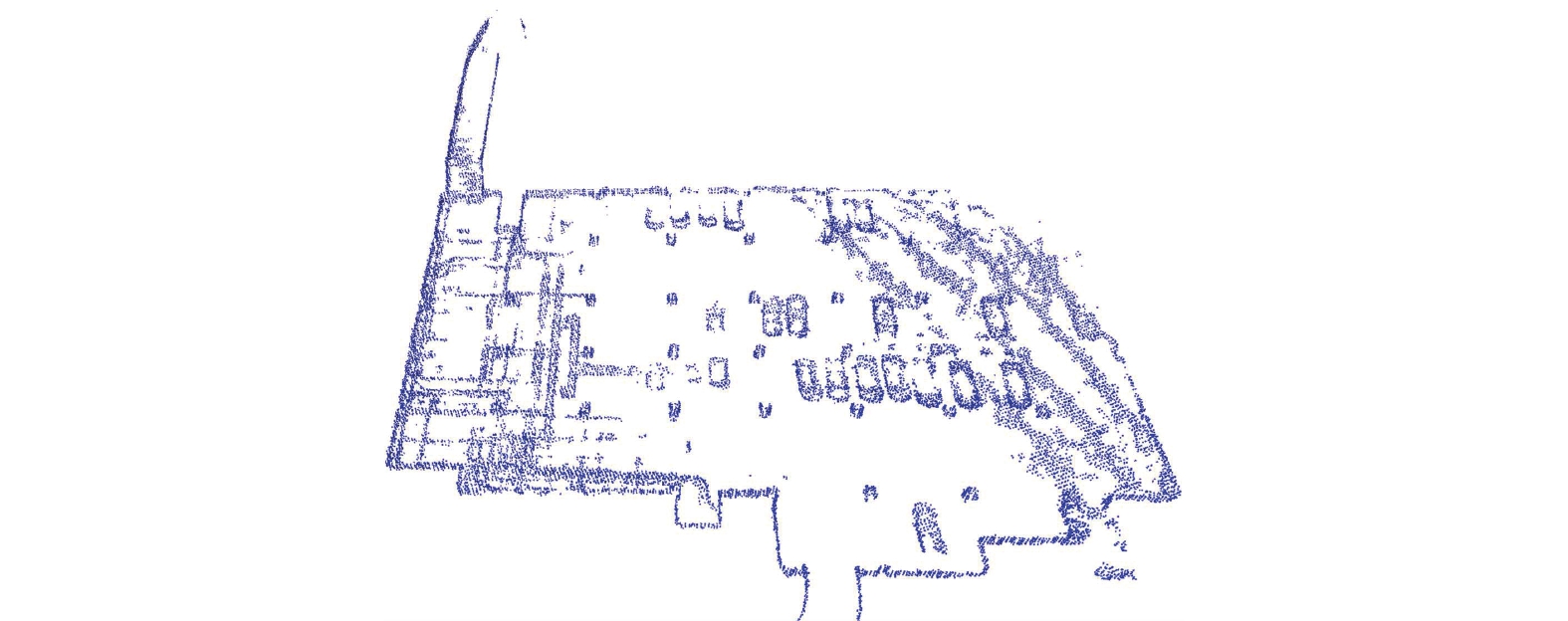
在地下停车场利用试验平台获取数据集后,利用LeGO-LOAM改进前后两种算法构建地图,如图5所示,图中红色方框处为建图起点和终点位置。由图可见,改进前LeGO-LOAM构建的点云地图存在漂移现象,而改进后算法回环效果较好,弥补了点云地图漂移现象,整体一致性和局部精度表现更好。
![]() 图 5 改进前后两种算法构建的点云地图Figure 5. Point cloud map constructed by the algorithms before and after improvement
图 5 改进前后两种算法构建的点云地图Figure 5. Point cloud map constructed by the algorithms before and after improvement2.2 轨迹估计
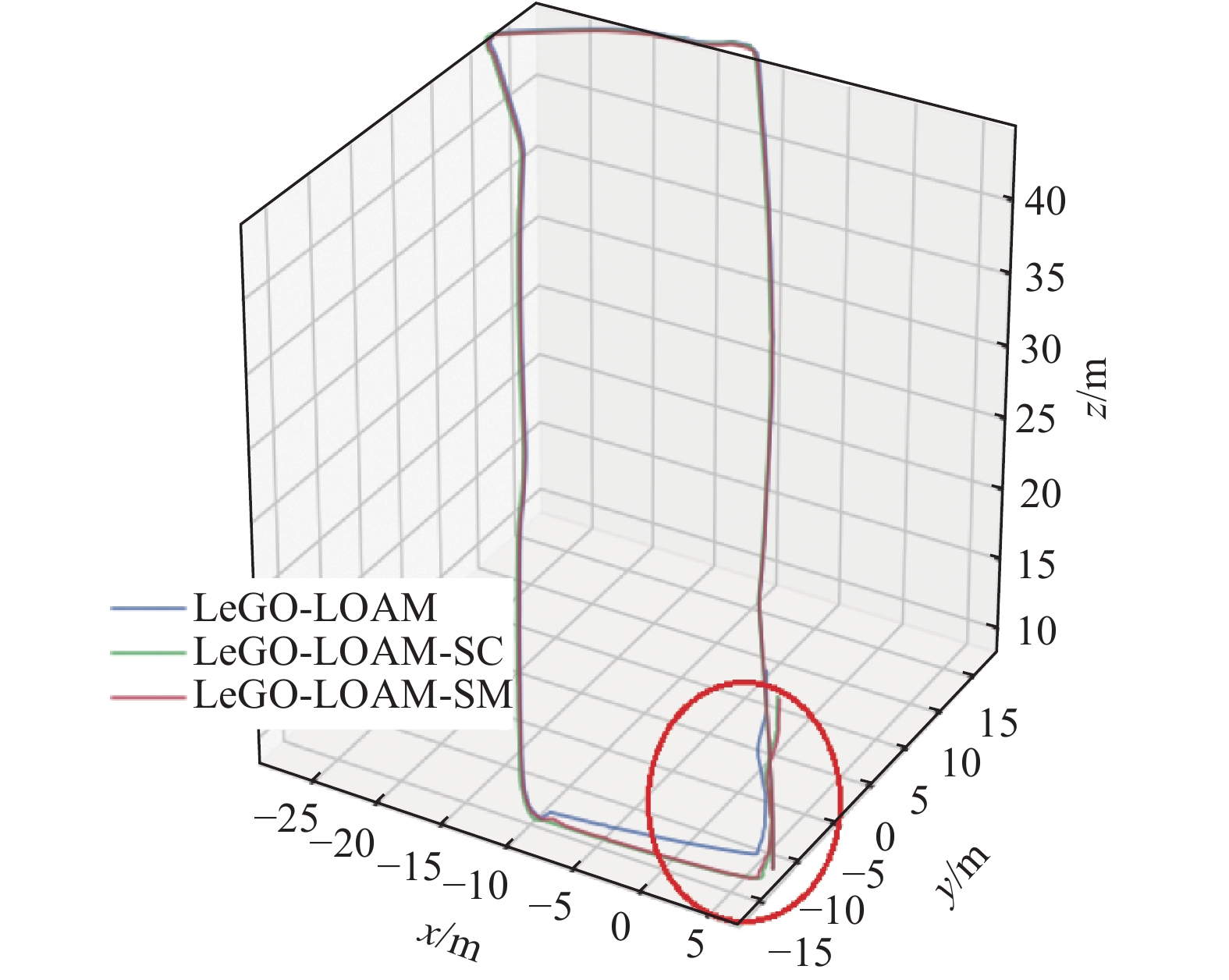
利用EVO工具比较LeGO-LOAM、LeGO-LOAM-SC和LeGO-LOAM-SM三种算法的运动估计轨迹,如图6所示。可以看出LeGO-LOAM生成的运动轨迹在转弯角度较大处(图中红色圈出部分)漂移较大,而改进算法建图轨迹更平滑,表明改进后算法整体效果更好。
为验证改进算法构建地图的全局一致性,以试验平台的初始位姿为起点,在地下停车场相同位置进行了多次位姿估计试验。利用LeGO-LOAM改进前后两种算法获取试验平台返回初始点时的位姿估计数据,取5次试验的位姿数据平均值为最终估计位姿,结果见表1。由表1可知,在地下停车场中仅使用三维激光雷达信息的情况下,改进算法LeGO-LOAM-SM实现了更精确的定位和建图效果,构建的地图平移旋转精度较LeGO-LOAM算法均有提高。
表 1 改进前后算法的相对位姿估计误差Table 1. Relative positional estimation errors of the algorithm before and after the improvement in two scenes评价指标 改进前 改进后 平移X/m −0.76 0.14 平移Y/m 0.18 0.06 平移Z/m 13.90 12.32 总平移/m 12.71 7.40 俯仰角/(°) −2.55 0.82 偏航角/(°) 4.84 −0.25 翻滚角/(°) 5.31 −0.81 总旋转/(°) 5.72 1.35 3. 占据栅格地图构建
三维点云地图直观性较好,但包含较多不必要的细节,占用较大存储空间,缺乏场景的位置信息且稳定性较差,没有可通行区域信息,难以用于后续的路径规划和导航。因此,将三维点云地图转换为3D占据栅格地图或2D占据栅格地图,便于煤矿井下机器人的路径规划与导航。
3.1 3D占据栅格地图
3D占据栅格地图无需先验信息就可以构建任何环境的全三维地图,能够随时融合新的地图数据或者传感器数据来更新地图,可以根据需要灵活扩展地图范围,包含有可通行区域信息且占用存储空间小。
基于上文获得的点云地图,利用地面平面拟合去除地面点和基于Octo-Map框架融合滤波的方法研究3D占据栅格地图的构建问题。
地面点去除参考了文献[41]提出的基于地面平面拟合的方法,经多次试验将阈值设定为0.12 m,构建的3D占据栅格地图效果较好,如图7所示。由图可见,直接生成的3D占据栅格地图中含有许多离群点(图7中黑色方框内的)。这些离群点并非静态障碍物,而是噪声和其他动态物体引起的,并非不可通行区域,会影响后续路径规划。
因此,在构建占据栅格地图时常采用滤波的方法来剔除这些离群点,改善环境中噪声和其他动态物体的影响。统计滤波器(Statistical Outlier Removal,SOR)[42] 是利用统计学对各个点的领域进行计算,滤除大于设定阈值的点从而去除稀疏离群的噪声点。采用SOR滤波器对构建的占据栅格地图中的离群点进行降噪,关键参数有邻近点数量k和系数
$ \gamma $ 。通过对图7所示3D占据栅格地图多次降噪试验,发现k=15,$\gamma $ =0.2时的降噪效果较好,如图8所示,黑色方框中离群点几乎全部滤除。3.2 2D占据栅格地图构建
2D占据栅格地图是机器人路径规划最常见的地图表达与应用形式,将构建的3D占据栅格地图投影到二维平面即得到相应的2D占据栅格地图。与2D激光雷达直接构建的2D占据栅格地图相比,其包含有三维空间中所需要的立体障碍物信息而非激光雷达所在平面的二维障碍物信息,对行驶在三维空间的移动机器人而言具有更好的避障效果。图9为利用图8所示的3D占据栅格地图向地平面投影得到的地下车库二维占据栅格地图。由于3D占据栅格地图中每个体素小为边长 0.01 m 的立方体,将其投影成二维占据栅格地图,则分辨率为0.01 m×0.01 m。其中,白色区域是可通行范围,黑色为障碍物位置,灰色为未知区域。
表2统计了构建的点云地图、3D占据栅格地图和2D占据栅格地图所占用的存储空间大小。与点云地图相比,3D占据栅格地图压缩了点云地图中包含的细节信息,节省了大量的存储空间,解决了点云地图无法提供障碍物空间信息的问题,而2D占据栅格地图在保留了障碍物信息的情况下进一步降低了占用内存空间,降低了机器人对硬件的要求,提高了系统的实时性,可以为机器人在煤矿复杂环境中的路径规划和自主导航提供地图支持。
表 2 不同种类地图占用内存对比Table 2. Comparison of different types of maps地图类型 点云地图 3D占据栅格地图 2D占据栅格地图 内存大小 24.3 MB 62.3 kB 16.3 kB 4. 构建地图精度
4.1 试验环境
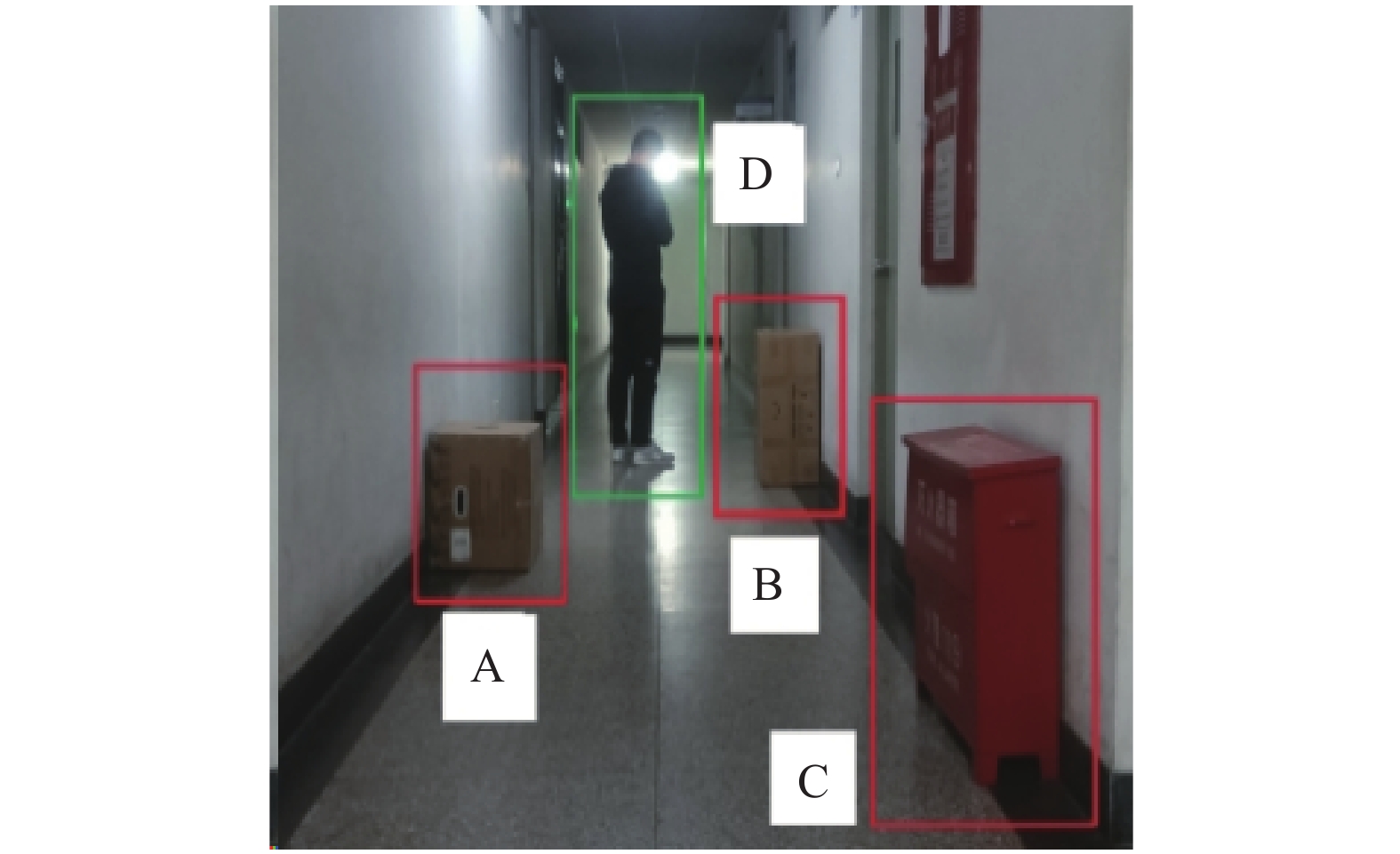
试验场地选择楼道长走廊,模拟煤矿井下封闭狭长且几何特征少的巷道环境,并在环境中设置障碍物和行人,如图10所示,其中红色方框中为静态障碍物A、B、C,绿色方框中为动态的行人D。由于试验中激光雷达的测距精度为±2 cm,故选用UT393A激光测距仪测得试验场地的实际尺寸和障碍物大小,其测量精度优于1.5 mm。
![]() 图 10 模拟煤矿井下狭长巷道的试验场地和环境设置Figure 10. Experimental site and environment setting for simulating narrow and long roadway in coal mine
图 10 模拟煤矿井下狭长巷道的试验场地和环境设置Figure 10. Experimental site and environment setting for simulating narrow and long roadway in coal mine4.2 结果讨论
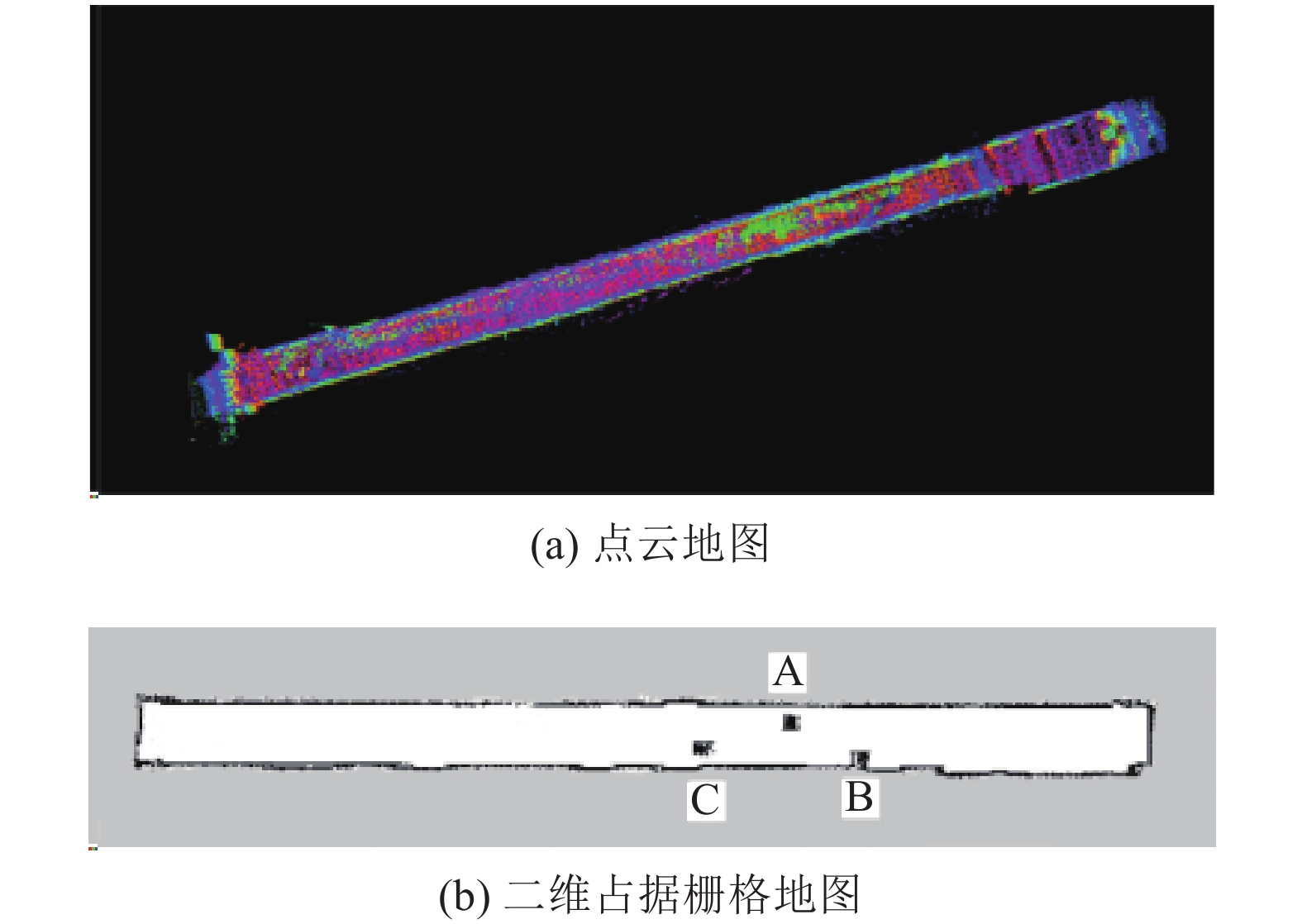
利用搭建的试验平台采集了试验场地的点云数据,并利用所提出的LeGO-LOAM-SM算法构建了试验场景的点云地图,进而生成2D占据栅格地图,如图11所示。由图可见,构建的2D占据栅格地图滤除了场景中的动态障碍物(行人),而静态障碍物(图中A、B、C)则得以保留,白色可通行区域没有离群点,为路径规划提供了可用地图。
![]() 图 11 煤矿井下模拟场景地图构建Figure 11. Map construction of underground coal mine simulation scenario
图 11 煤矿井下模拟场景地图构建Figure 11. Map construction of underground coal mine simulation scenario提取了构建的2D占据栅格地图相应的尺寸,列于表3。由表3可知,改进算法构建的2D占据栅格地图误差在0.01 m内,具有较高的精度,满足路径规划建图要求。
表 3 构建的地图尺寸与实际尺寸对照Table 3. Comparison between constructed map size and actual size类别 实际长度/m 实际宽度/m 建图长度/m 建图宽度/m 试验场地 46.803 1.822 46.811 1.817 障碍物A 0.765 0.411 0.768 0.417 障碍物B 0.567 0.378 0.563 0.372 障碍物C 0.688 0.210 0.681 0.216 5. 结 论
1)提出了一种融合LeGO-LOAM和SegMatch的LeGO-LOAM-SM算法,开展了模拟场景的SLAM试验,结果表明改进算法构建的地图更清晰,回环效果更好,整体一致性和局部精度表现更好,估计轨迹更平滑,平移旋转精度更高,能够实现更高精度的点云地图构建和位姿估计,适用于大场景的点云地图构建。
2)针对点云地图无法满足煤矿机器人路径规划和导航需求的问题,研究了基于地面平面拟合去除地面点与SOR滤波器滤除离群点的动态降噪的3D和2D占据栅格地图构建方法,开展了煤矿井下模拟环境的试验,结果表明所构建的栅格地图可有效滤除动态障碍物,具有0.01 m的建图精度,且所需存储空间较点云地图降低了3个数量级。
3)研究成果对机器人在煤矿复杂环境中的路径规划和自主导航提供地图支持,但在试验验证时,障碍物、地面平整度以及粉尘干扰等环境未能完全按照煤矿井下环境模拟,且单一的激光SLAM在复杂退化环境中的特征描述与匹配性能有待提高。开展真实场景的试验验证和采用多传感器融合改善煤矿井下退化环境的建图是下一步要研究解决的问题。
-
![]()
图 2 SegMatch点云分割、特征提取
Figure 2. Point cloud segmentation and feature extraction with SegMatch
![]()
图 5 改进前后两种算法构建的点云地图
Figure 5. Point cloud map constructed by the algorithms before and after improvement
![]()
图 10 模拟煤矿井下狭长巷道的试验场地和环境设置
Figure 10. Experimental site and environment setting for simulating narrow and long roadway in coal mine
![]()
图 11 煤矿井下模拟场景地图构建
Figure 11. Map construction of underground coal mine simulation scenario
表 1 改进前后算法的相对位姿估计误差
Table 1 Relative positional estimation errors of the algorithm before and after the improvement in two scenes
评价指标 改进前 改进后 平移X/m −0.76 0.14 平移Y/m 0.18 0.06 平移Z/m 13.90 12.32 总平移/m 12.71 7.40 俯仰角/(°) −2.55 0.82 偏航角/(°) 4.84 −0.25 翻滚角/(°) 5.31 −0.81 总旋转/(°) 5.72 1.35  下载: 导出CSV
下载: 导出CSV
表 2 不同种类地图占用内存对比
Table 2 Comparison of different types of maps
地图类型 点云地图 3D占据栅格地图 2D占据栅格地图 内存大小 24.3 MB 62.3 kB 16.3 kB
下载: 导出CSV
表 3 构建的地图尺寸与实际尺寸对照
Table 3 Comparison between constructed map size and actual size
类别 实际长度/m 实际宽度/m 建图长度/m 建图宽度/m 试验场地 46.803 1.822 46.811 1.817 障碍物A 0.765 0.411 0.768 0.417 障碍物B 0.567 0.378 0.563 0.372 障碍物C 0.688 0.210 0.681 0.216
下载: 导出CSV
-
[1] 王国法,任世华,庞义辉,等. 煤炭工业“十三五”发展成效与“双碳”目标实施路径[J]. 煤炭科学技术,2021,49(9):1−8. doi: 10.13199/j.cnki.cst.2021.09.001 WANG Guofa,REN Shihua,PANG Yihui,et al. Development achievements of China's coal industry during the 13th Five-Year Plan period and implementation path of “dual carbon” target[J]. Coal Science and Technology,2021,49(9):1−8. doi: 10.13199/j.cnki.cst.2021.09.001
[2] 王 雷,朱玉芹. 煤矿机器人技术创新与成果实践[J]. 智能矿山,2022,3(7):115−125. WANG Lei,ZHU Yuqin. Technical innovation and achievement practice of coal mine robot[J]. Journal of Smart Mine,2022,3(7):115−125.
[3] 李忠奎. 煤矿轨道巡检机器人设计研究[J]. 煤炭技术,2022,41(9):170−173. doi: 10.13301/j.cnki.ct.2022.09.039 LI Zhongkui. Design and research of coal mine track inspection robot[J]. Coal Technology,2022,41(9):170−173. doi: 10.13301/j.cnki.ct.2022.09.039
[4] 薛光辉,胡卫军,王誉博,等. 煤矿巷道修复作业机器人作业机构设计与性能分析[J]. 煤炭工程,2022,54(5):182−187. XUE Guanghui,HU Weijun,WANG Yubo,et al. Operation mechanism design and performance analysis of coalmine roadway repair robot[J]. Coal Engineering,2022,54(5):182−187.
[5] 葛世荣,胡而已,裴文良. 煤矿机器人体系及关键技术[J]. 煤炭学报,2020,45(1):455−463. doi: 10.13225/j.cnki.jccs.YG19.1478 GE Shirong,HU Eryi,PEI Wenliang. Classification system and key technology of coal mine robot[J]. Journal of China Coal Society,2020,45(1):455−463. doi: 10.13225/j.cnki.jccs.YG19.1478
[6] 徐伟锋,金向阳,张丽平. 煤矿掘进机器人视觉位姿感知与控制关键技术[J]. 煤矿机械,2022,43(5):181−184. doi: 10.13436/j.mkjx.202205059 XU Weifeng,JIN Xiangyang,ZHANG Liping. Key technology of vision pose perception and control of coal mine tunneling robot[J]. Coal Mine Machinery,2022,43(5):181−184. doi: 10.13436/j.mkjx.202205059
[7] 张旭辉,吕欣媛,王 甜,等. 数字孪生驱动的掘进机器人决策控制系统研究[J]. 煤炭科学技术,2022,50(7):36−49. doi: 10.13199/j.cnki.cst.2022-0176 ZHANG Xuhui,LU Xinyuan,WANG Tian,et al. Research on the decision control system of tunneling robot driven by digital twin engine[J]. Coal Science and Technology,2022,50(7):36−49. doi: 10.13199/j.cnki.cst.2022-0176
[8] 巩 固,朱 华. 基于目标识别与避障的煤矿救援机器人自主行走[J]. 南京理工大学学报,2022,46(1):32−39. GONG Gu,ZHU Hua. Autonomous walking of coal mine rescue robot based on target recognition and obstacle avoidance[J]. Journal of Nanjing University of Science and Technology,2022,46(1):32−39.
[9] 杨健健,张 强,王 超,等. 煤矿掘进机的机器人化研究现状与发展[J]. 煤炭学报,2020,45(8):2995−3005. doi: 10.13225/j.cnki.jccs.2019.1452 YANG Jianjian,ZHANG Qiang,WANG Chao,et al. Status and development of robotization research on roadheader for coal mines[J]. Journal of China Coal Society,2020,45(8):2995−3005. doi: 10.13225/j.cnki.jccs.2019.1452
[10] SMITH R C,CHEESEMAN P. On the representation and estimation of spatial uncertainty[J]. The International Journal of Robotics Research,1986,5(4):56−68. doi: 10.1177/027836498600500404
[11] DURRANT-WHYTE H F. Consistent integration and propagation of disparate sensor observations[J]. The International Journal of Robotics Research,1987,6(3):3−24. doi: 10.1177/027836498700600301
[12] HUANG L. Review on LiDAR-based SLAM Techniques [C]//Proceedings of 2021 International Conference on Signal Processing and Machine Learning (CONF-SPML), Beijing: IEEE, 2021: 163−168.
[13] TAHERI H,XIA Z C. SLAM; definition and evolution[J]. Engineering Applications of Artificial Intelligence,2021,97:104032. doi: 10.1016/j.engappai.2020.104032
[14] CHEN Y, TANG J, HYYPPÄ J, et al. Mobile laser scanning based 3D technology for mineral environment modelling and positioning [C]// Proceedings of 2016 Fourth International Conference on Ubiquitous Positioning, Stanford: IEEE, 2016: 289−294.
[15] LI M, ZHU H, YOU S, et al. Efficient laser-based 3D SLAM in real time for coal mine rescue robots[C]//Proceedings of 2018 IEEE 8th Annual International Conference on Cyber Technology in Automation, Control, and Intelligent Systems, Granada: IEEE, 2018: 971−976.
[16] 杨 林,马宏伟,王 岩,等. 煤矿巡检机器人同步定位与地图构建方法研究[J]. 工矿自动化,2019,45(9):18−24. doi: 10.13272/j.issn.1671-251x.17444 YANG Lin,MA Hongwei,WANG Yan,et al. Research on method of simultaneous localization and mapping of coal mine inspection robot[J]. Journal of Mine Automation,2019,45(9):18−24. doi: 10.13272/j.issn.1671-251x.17444
[17] 杨 林,马宏伟,王 岩. 煤矿井下移动机器人基于激光惯性的融合SLAM算法[J]. 煤炭学报,2022,47(9):3523−3534. YANG Lin,MA Hongwei. WANG Yan. Laser inertia-based fused SLAM algorithm for underground mobile robots in coal mines[J]. Journal of China Coal Society,2022,47(9):3523−3534.
[18] YANG Jianjian, WANG Chao, ZHANG Qiang, et al. Modeling of Laneway Environment and Locating Method of Roadheader Based on Self-Coupling and Hector SLAM [C]//Proceedings of 5th International Conference on Electromechanical Control Technology and Transportation, Nanchang: IEEE, 2020: 263-268.
[19] COWLEY A, MILLER I D, TAYLOR C J. UPSLAM: Union of Panoramas SLAM [C]//Proceedings of 2021 IEEE International Conference on Robotics and Automation, Xi’an: IEEE, 2021: 1103−1109.
[20] XU Jiachang,HUANG Yourui,ZHAO Ruijuan,et al. Probabilistic Membrane Compu-ting-Based SLAM for Patrol UAVs in Coal Mines[J]. Journal of Sensors,2021:7610126. doi: 10.1155/2021/7610126
[21] REN Z,WANG L,BI L. Robust GICP-based 3D LiDAR SLAM for underground mining environment[J]. Sensors,2019,19(13):2915. doi: 10.3390/s19132915
[22] REN Z,WANG L. Accurate real-time localization estimation in underground mine environments based on a distance- weight map (DWM)[J]. Sensors,2022,22(4):1463. doi: 10.3390/s22041463
[23] ZHANG J, SINGH S. LOAM: Lidar Odometry and Mapping in Real-time [C]//Proceedings of Robotics: Science and Systems, Daegu: Berkeley, CA, 2014.
[24] ZHANG J,SINGH S. Low-drift and real-time lidar odometry and mapping[J]. Autonomous Robots,2017,41(2):401−416. doi: 10.1007/s10514-016-9548-2
[25] SALTI S,TOMBARI F,Di STEFANO L. SHOT: Unique signatures of histograms for surface and texture description[J]. Computer Vision and Image Understanding,2014,125:251−264. doi: 10.1016/j.cviu.2014.04.011
[26] GUO J,BORGES P V,PARK C,et al. Local descriptor for robust place recognition using lidar intensity[J]. IEEE Robotics and Automation Letters,2019,4(2):1470−1477. doi: 10.1109/LRA.2019.2893887
[27] GUO Y,BENNAMOUN M,SOHEL F,et al. A comprehensive performance evaluation of 3D local feature descriptors[J]. International Journal of Computer Vision,2016,116(1):66−89. doi: 10.1007/s11263-015-0824-y
[28] RIZZINI D L. Place recognition of 3D landmarks based on geometric relations [C]//Proceedings of 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vancouver: IEEE, 2017: 648−654.
[29] KIM G, KIM A. Scan context: Egocentric spatial descriptor for place recognition within 3d point cloud map [C]//2018 IEEE/RSJ International Conference on Intelligent Robots and Systems, Granada: IEEE, 2018: 4802−4809.
[30] WANG Y, SUN Z, XU C, et al. Lidar iris for loop-closure detection [C]//Proceedings of 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems, Las Vegas: IEEE, 2020: 5769−5775.
[31] DUBÉ R, DUGAS D, STUMM E, et al. Segmatch: Segment based place recognition in 3d point clouds [C]//Proceedings of 2017 IEEE International Conference on Robotics and Automation//Singapore: IEEE, 2017: 5266−5272.
[32] DOUILLARD B, QUADROS A, MORTON P, et al. Scan segments matching for pairwise 3D alignment [C]//Proceedings of 2012 IEEE International Conference on Robotics and Automation, Saint Paul: IEEE, 2012: 3033−3040.
[33] NIETO J, BAILEY T, NEBOT E. Scan-SLAM: Combining EKF-SLAM and scan correlation [C]//Corke, P. , Sukkariah, S. (eds) Field and Service Robotics, Prot Douglas: Berlin: Springer Tracts in Advanced Robotics, 2006, 25: 167−178.
[34] LI Y, SU P, CAO M, et al. Semantic Scan Context: Global Semantic Descriptor for LiDAR-based Place Recognition[C]// Proceedings of 2021 IEEE International Conference on Real-time Computing and Robotics , Xi’an: IEEE, 2021: 251−256.
[35] ZHOU Y,WANG Y,POIESI F,et al. Loop closure detection using local 3D deep descriptors[J]. IEEE Robotics and Automation Letters,2022,7(3):6335−6342. doi: 10.1109/LRA.2022.3156940
[36] MA J,ZHANG J,XU J,et al. Overlap transformer: an efficient and yaw-angle-invariant transformer network for LiDAR-based place recognition[J]. IEEE Robotics and Automation Letters,2022,7(3):6958−6965. doi: 10.1109/LRA.2022.3178797
[37] SHAN T, ENGLOT B. Lego-loam: Lightweight and ground-optimized lidar odometry and mapping on variable terrain [C]//Proceedings of 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems , Granada: IEEE, 2018: 4758−4765.
[38] JI X, ZUO L, ZHANG C, et al. LLOAM: Lidar odometry and mapping with loop-closure detection-based correction [C]//Proceedings of 2019 IEEE International Conference on Mechatronics and Automation, Montreal: IEEE, 2019: 2475−2480.
[39] 欧阳仕晗. 基于分割匹配和SLAM的移动机器人三维激光导航研究[D]. 沈阳: 沈阳工业大学, 2020 OUYANG Shihan. Research on 3D laser navigation of mobile robot based on segmentation matching and SLAM [D]. Shenyang: Shenyang University of Technology, 2020.
[40] XUE G,WEI J,LI R,et al. LeGO-LOAM-SC: An improved simultaneous localization and mapping method fusing LeGO- LOAM and scan context for underground coalmine[J]. Sensors,2022,22(2):520. doi: 10.3390/s22020520
[41] ZERMAS D, IZZAT I, PAPANIKOLOPOULOS N. Fast segmentation of 3D point clouds: A paradigm on lidar data for autonomous vehicle applications [C]//Proceedings of 2017 IEEE International Conference on Robotics and Automation, Singapore : IEEE, 2017: 5067−5073.
[42] 李茂月,马康盛,王 飞,等. 基于结构光在机测量的叶片点云预处理方法研究[J]. 仪器仪表学报,2020,41(8):55−66. doi: 10.19650/j.cnki.cjsi.J2006454 LI Maoyue,MA Kangsheng,WANG Fei,et al. Research on the preprocessing method of blade point cloud based on structured light on-machine measurement[J]. Chinese Journal of Scientific Instrument,2020,41(8):55−66. doi: 10.19650/j.cnki.cjsi.J2006454
-
期刊类型引用(10)
1. 魏峻辉. 煤矿井下激光雷达测量技术与性能评估. 全面腐蚀控制. 2025(06)  百度学术
百度学术
2. 赵克顿,赵洪华,陈志良,赵建,赵丰瑞,韩青,张荣成,周涛,李钰茹. 矿用多功能机器人设计与应用研究. 煤炭工程. 2025(01): 212-217 . 百度学术
3. 关士远. 综采工作面隔爆巡检机器人设计及工程实践. 煤炭科学技术. 2025(02): 363-373 . 本站查看
4. 毛清华,柴建权,陈彦璋,薛旭升,王川伟. 激光雷达和IMU融合的煤矿掘进巷道三维重建方法. 煤炭科学技术. 2025(02): 351-362 . 本站查看
5. 薛光辉,张钲昊,张桂艺,李瑞雪. 煤矿井下点云特征提取和配准算法改进与激光SLAM研究. 煤炭科学技术. 2025(05): 301-312 . 本站查看
6. 马宝良,崔丽珍,李敏超,张清宇. 露天煤矿环境下基于LiDAR/IMU的紧耦合SLAM算法研究. 煤炭科学技术. 2024(03): 236-244 . 本站查看
7. 刘敬东,李旭,于凤启,苟丙荣,贺国庆,巩泽文. 激光SLAM技术在巷道精细建模的应用研究. 煤矿机械. 2024(10): 199-202 . 百度学术
8. 黄鹤松,任伟,高书通,李杨,营祝乐. 基于激光SLAM的矿用巡检装置控制系统设计. 煤矿安全. 2024(11): 210-216 . 百度学术
9. 崔邵云,鲍久圣,胡德平,袁晓明,张可琨,阴妍,王茂森,朱晨钟. SLAM技术及其在矿山无人驾驶领域的研究现状与发展趋势. 工矿自动化. 2024(10): 38-52 . 百度学术
10. 贾江伟,路前海,李洪胜,代晨昱,刘艳伦,燕斌. 多激光雷达在煤矿巷道三维重构系统中的应用研究. 中国煤炭. 2024(10): 84-90 . 百度学术
其他类型引用(7)


计量
- 文章访问数: 374
- HTML全文浏览量: 67
- PDF下载量: 113
- 被引次数: 17
